|
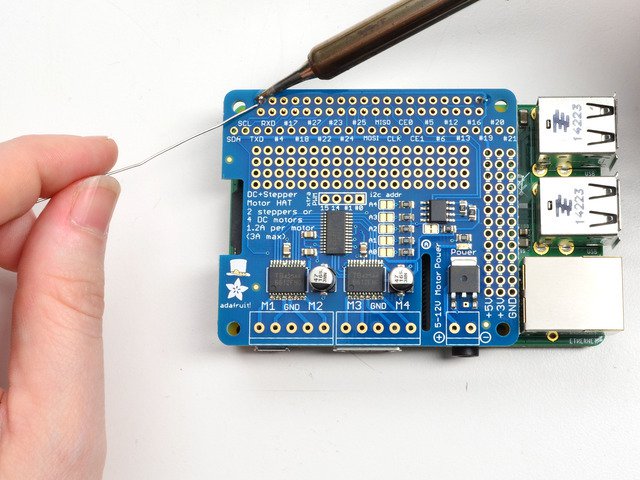
My MotorHAT came in the mail from Adafruit. Always a happy moment when parts come in the mail. |
 |
|
It's pretty easy to do, once you get the hang of it. |
 |
|
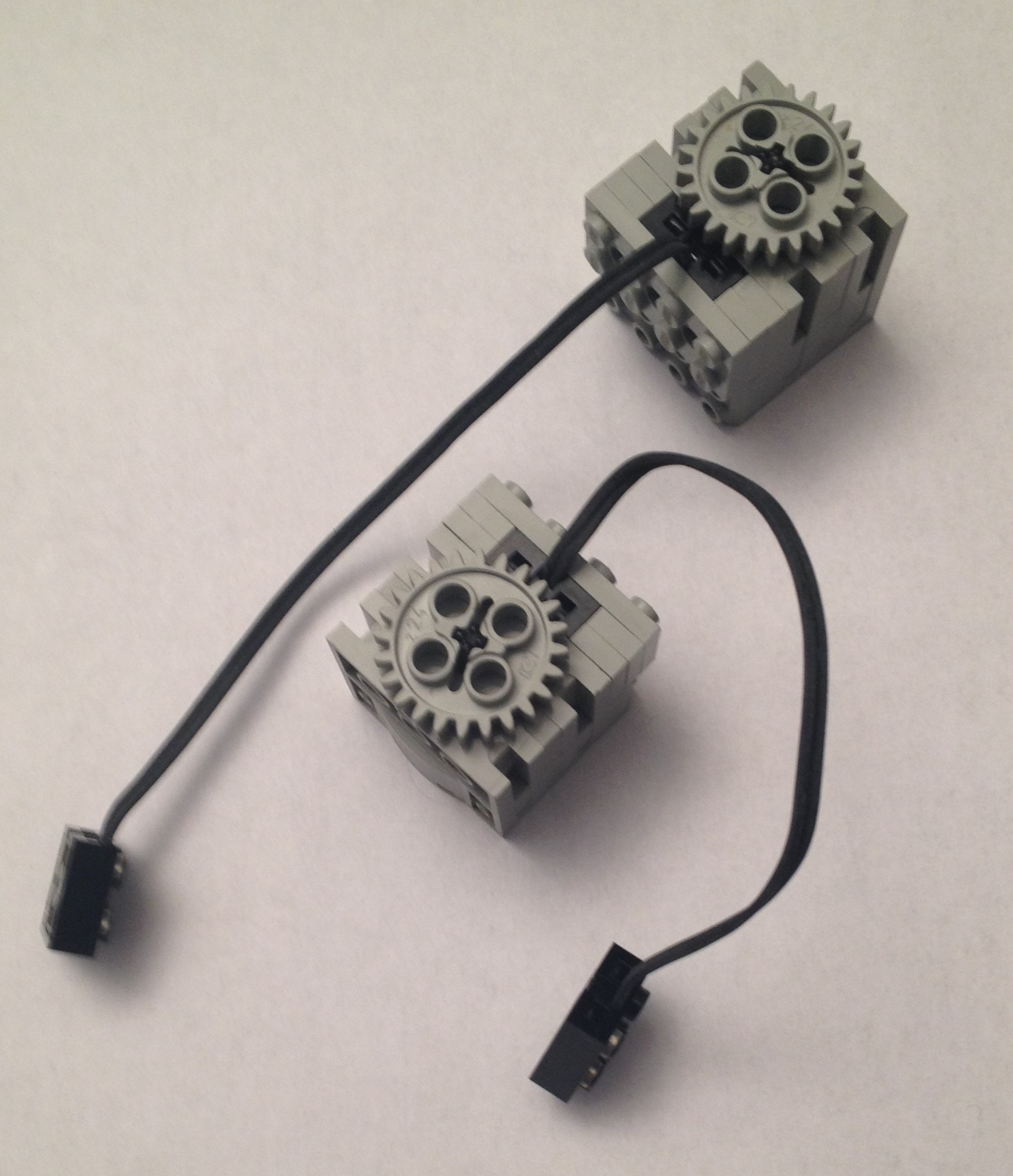
Once all the soldering iwas done, I needed to wire in one of the motors I had from my old Lego set. Not exactly production worthy, but I wanted to make sure I could get a motor to turn. I had an old variable voltage power supply that I hooked up to the power terminals on the MotorHAT. |
 |
|
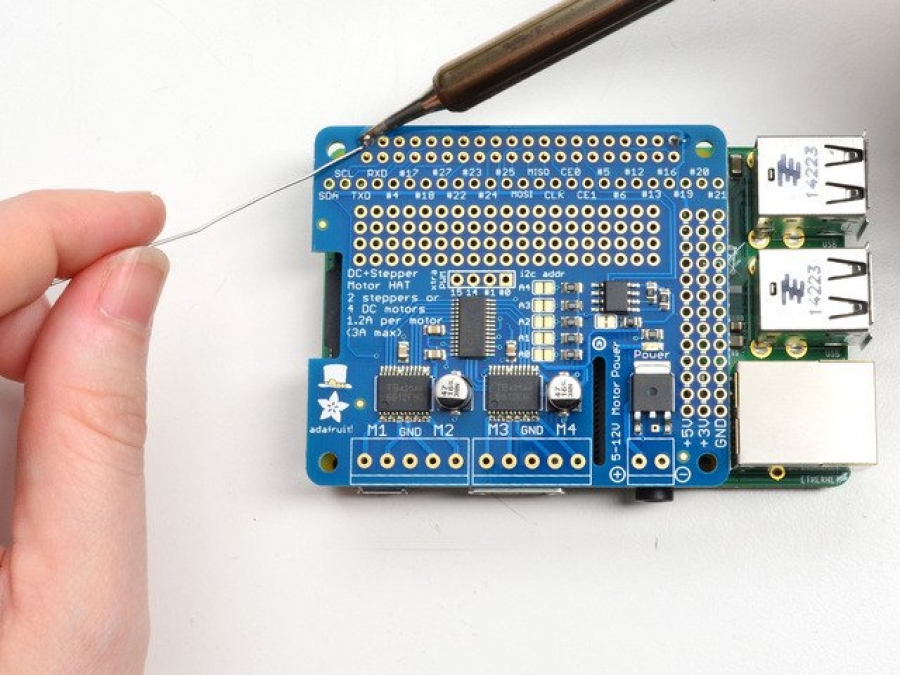
Next, I downloaded the Adafruit library that goes with the board, and found a nice place for it on the Pi. Follow these instructions carefully, they've done a good job documenting the process. I was psyched! |
Wiring in the motor control board
Leave a comment
Make sure you enter all the required information, indicated by an asterisk (*). HTML code is not allowed.



